Planning scene and collision objects
Note
The following examples use the ROS backend and the MoveI! planner for UR5 robots. Before running them, please make sure you have the ROS backend correctly configured and the UR5 Demo started.
To plan motion paths that avoid collisions with other objects than the robot itself, the backend’s planning scene has to be updated.
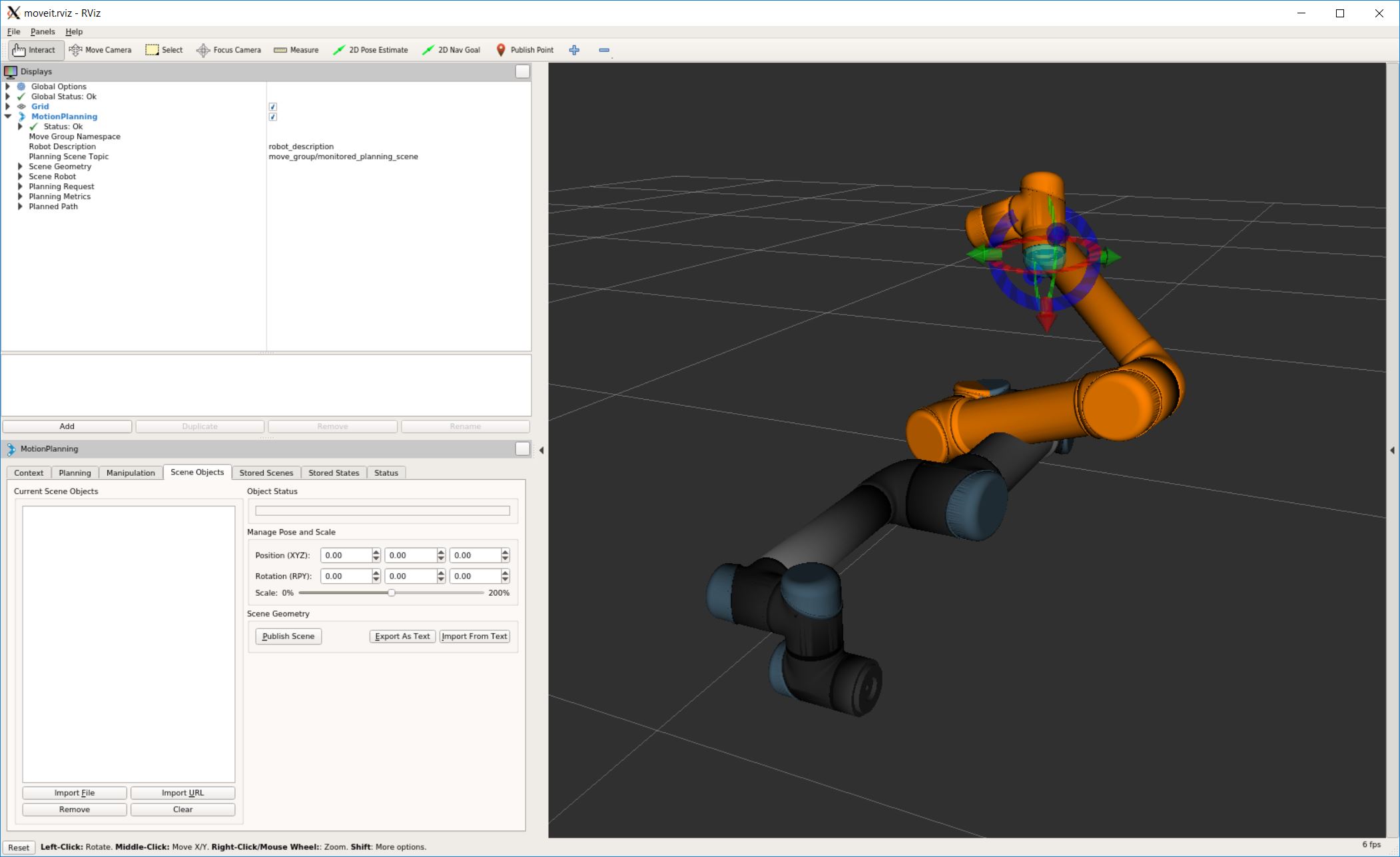
This is the representation of the planning scene in RViz with the UR5.
Note
If using Docker to run ROS, you can open RViz on your browser.
Collision meshes
The following script adds and then removes a floor to the planning scene.
import time
from compas.datastructures import Mesh
import compas_fab
from compas_fab.backends import RosClient
from compas_fab.robots import CollisionMesh
from compas_fab.robots import PlanningScene
with RosClient() as client:
robot = client.load_robot()
scene = PlanningScene(robot)
assert robot.name == 'ur5_robot'
mesh = Mesh.from_stl(compas_fab.get('planning_scene/floor.stl'))
cm = CollisionMesh(mesh, 'floor')
scene.add_collision_mesh(cm)
# sleep a bit before removing the floor
time.sleep(1)
scene.remove_collision_mesh('floor')
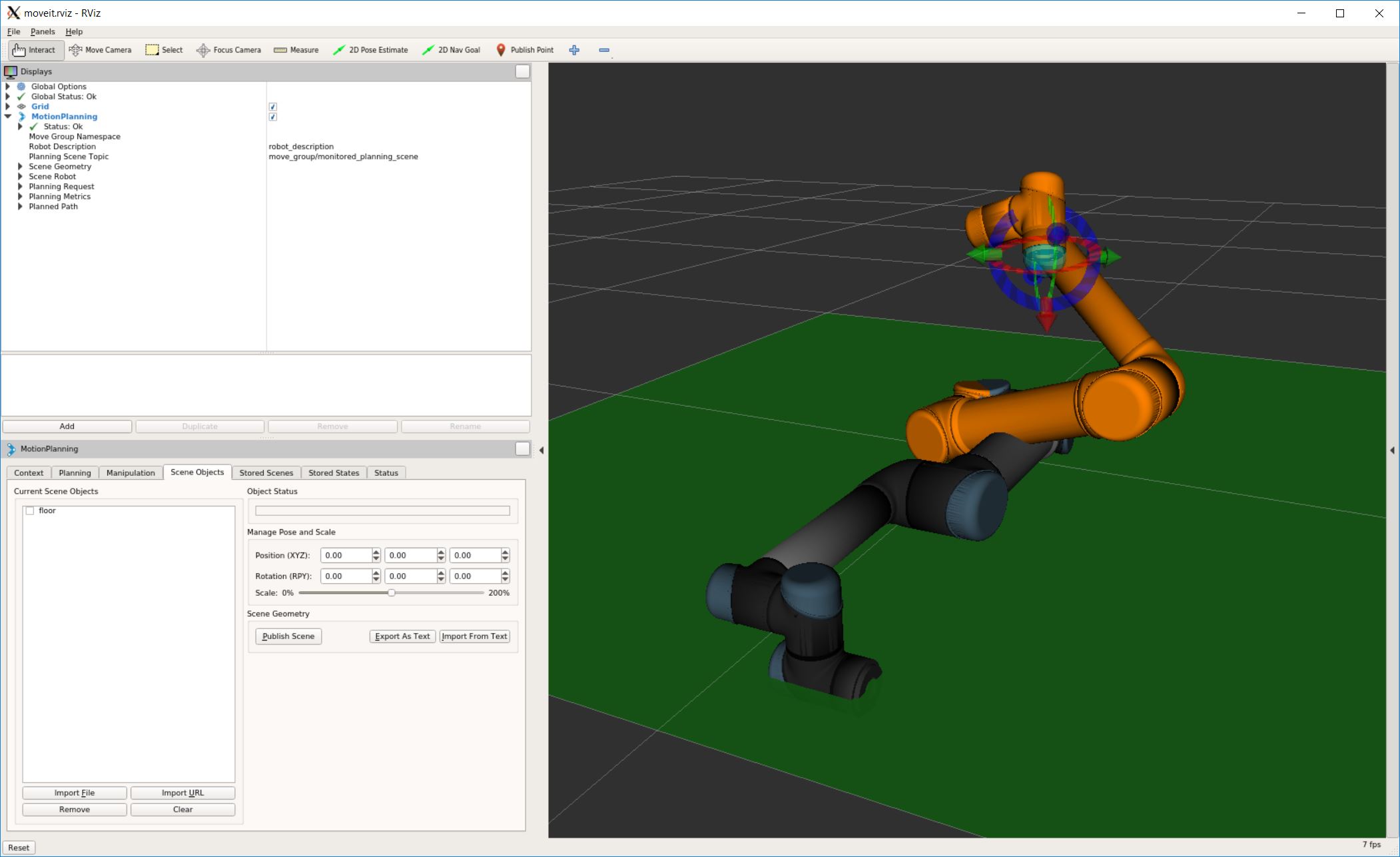
The backend’s updated planning scene while executing the above script.
The following script adds several boxes (bricks) to the planning scene. Here,
we use append instead of add to have multiple collision objects
clustered under the same identifier. Like that, we don’t need to keep track of
all identifiers when we later remove them.
import time
from compas.datastructures import Mesh
from compas.geometry import Box
from compas_fab.backends import RosClient
from compas_fab.robots import CollisionMesh
from compas_fab.robots import PlanningScene
with RosClient() as client:
robot = client.load_robot()
scene = PlanningScene(robot)
assert robot.name == 'ur5_robot'
brick = Box.from_width_height_depth(0.11, 0.07, 0.25)
for i in range(5):
mesh = Mesh.from_vertices_and_faces(brick.vertices, brick.faces)
cm = CollisionMesh(mesh, 'brick')
cm.frame.point.y += 0.5
cm.frame.point.z += brick.zsize * i
scene.append_collision_mesh(cm)
# sleep a bit before removing the bricks
time.sleep(1)
scene.remove_collision_mesh('brick')
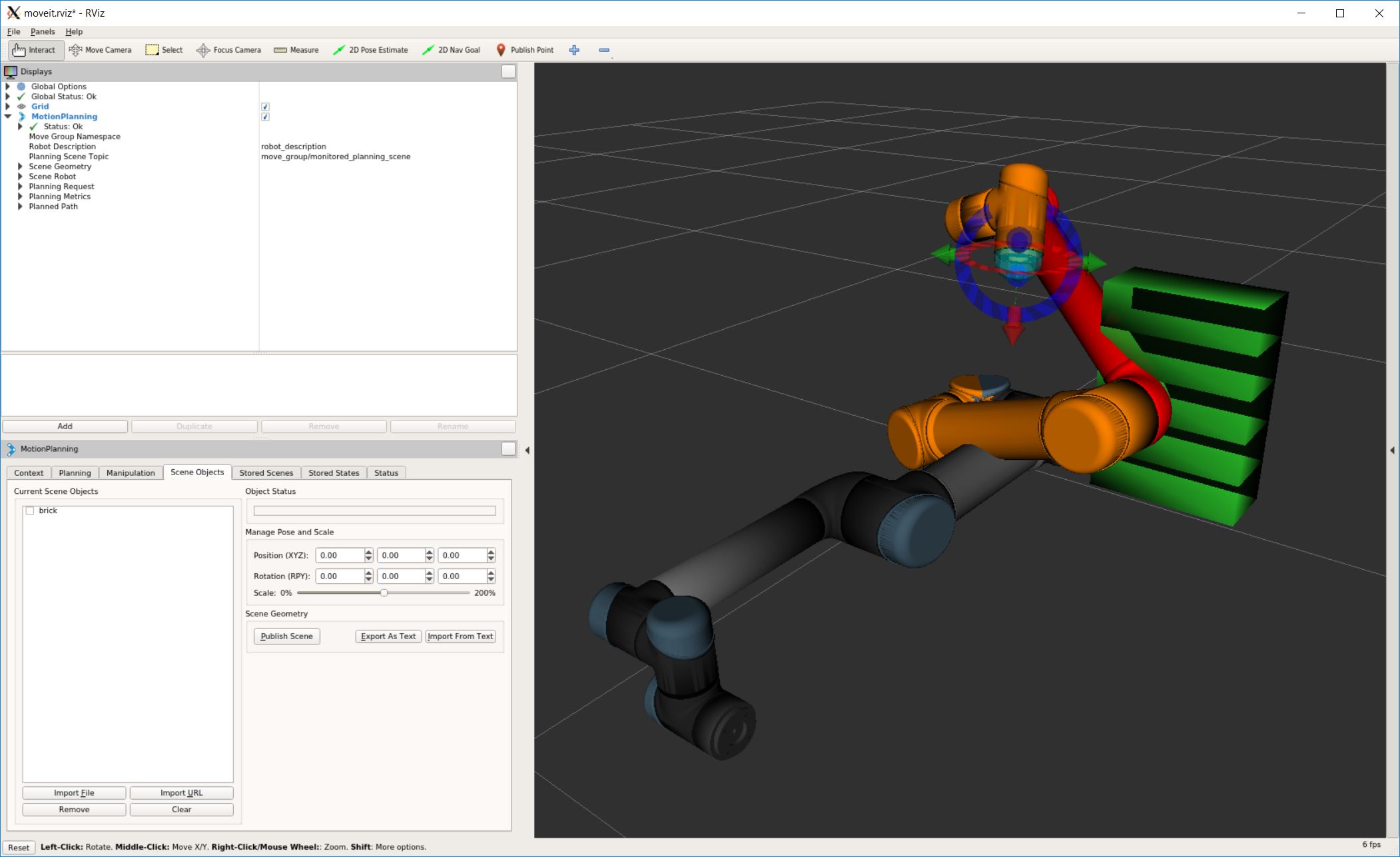
The backend’s updated planning scene while executing the above script. Note the red robot link indicating the collision.
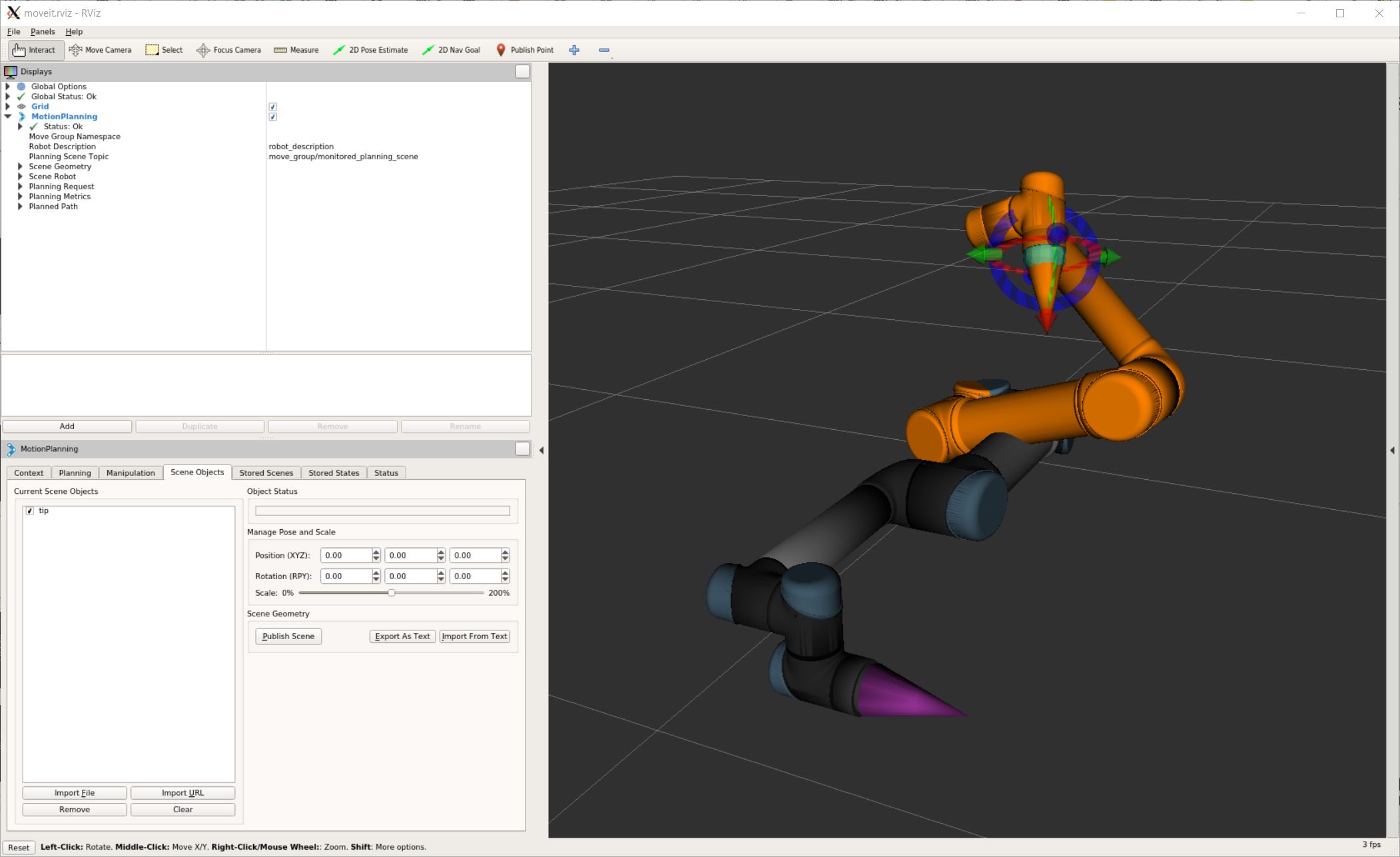
Attach tool to a robot’s end-effector
The following script defines a tool, described by a collision mesh and a frame, and attaches and removes it to the robot’s end-effector.
import time
from compas.datastructures import Mesh
from compas.geometry import Frame
import compas_fab
from compas_fab.backends import RosClient
from compas_fab.robots import PlanningScene
from compas_fab.robots import Tool
with RosClient() as client:
robot = client.load_robot()
scene = PlanningScene(robot)
assert robot.name == 'ur5_robot'
# create collision object
mesh = Mesh.from_stl(compas_fab.get('planning_scene/cone.stl'))
t1cf = Frame([0.14, 0, 0], [0, 0, 1], [0, 1, 0]) # TODO: check this frame!
tool = Tool(mesh, t1cf, name='tip')
scene.add_attached_tool(tool)
# sleep a bit before removing the tip
time.sleep(1)
# check if it's really there
planning_scene = robot.client.get_planning_scene()
acm = planning_scene.robot_state.attached_collision_objects
assert acm[0].object['id'].startswith('tip_')
scene.remove_attached_tool()
planning_scene = robot.client.get_planning_scene()
assert acm[0].object['id'] not in [c.object['id'] for c in planning_scene.robot_state.attached_collision_objects]
The backend’s updated planning scene while executing the above script.