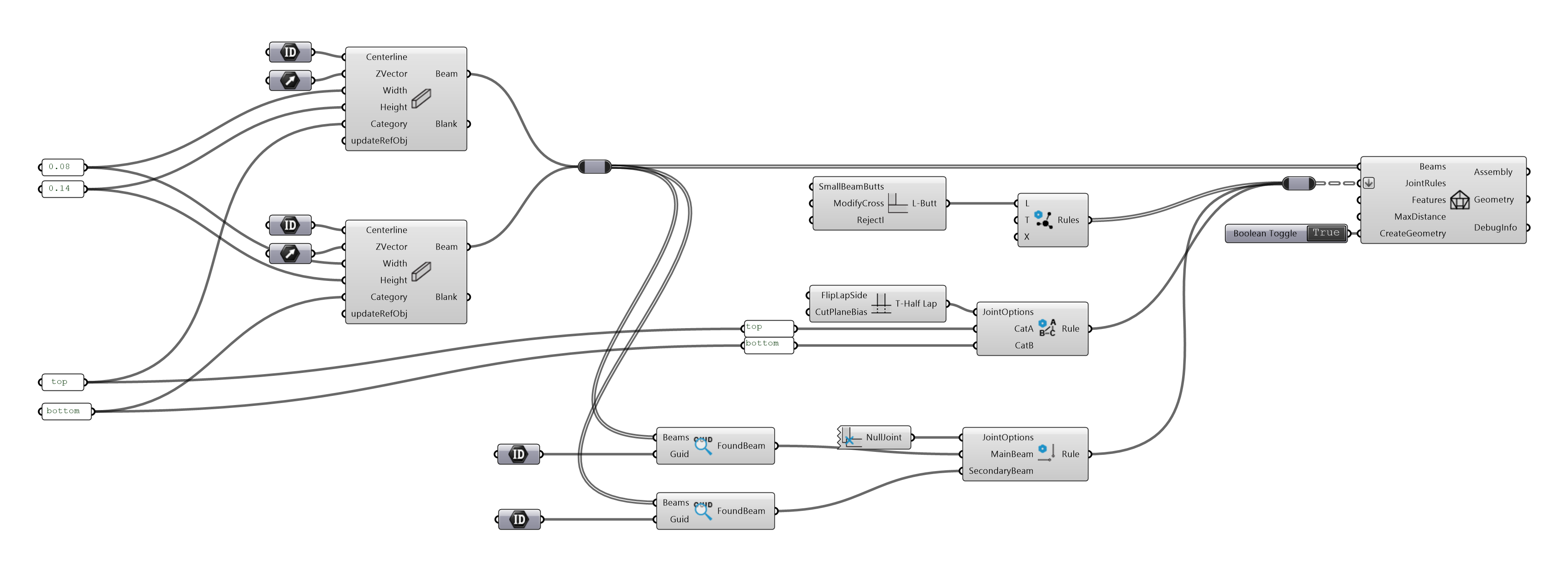
Joint Rules
The joints between beams are defined by rules. There are three different levels of rules, where each of them overrides any lower-priority rule. The rules are listed hereafter from lowest to highest level of priority:
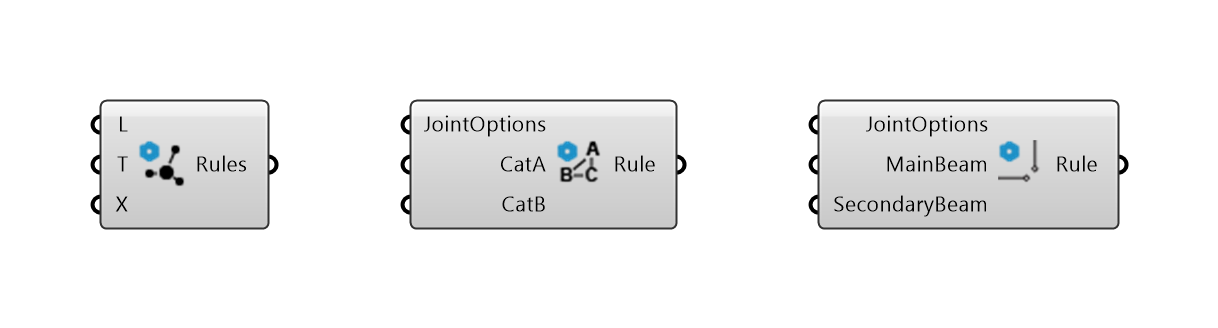
Topological Joint Rules - the lowest-priority-level rule, applied on the entire assembly. It automatically recognises the joint topology (L, T or X) between each beam and applies joint type corresponding to the joint topology. See also Joints
Inputs:
L - joint type to be applied to L topology. Default type is L-Miter.
T - joint type to be applied to T topology. Default type is T-Butt.
X - joint type to be applied to X topology. Default type is X-HalfLap.
Category Joint Rules - the second level, defines a single joint type for a specific topology between two categories of beams. The categories are assigned through the string-input Category in the component
Beamand added to the rhino lines.Inputs:
JointOptions - joint type to be applied to a combination of specific categories of beams.
CatA - category of the first beam.
CatB - category of the second beam.
Direct Joint Rules - the highest level, assigns a joint type directly to specific beams. The beams can be selected using the component
Find Beam By Rhino GUIDSee also Beam.Inputs:
JointOptions - joint type to be applied to a combination of specific categories of beams.
MainBeam - first beam.
SecondaryBeam - second beam.
Note
Each rule overrides any lower rule, i.e., Direct Joint Rules override Category Joint Rules as well as Topological Joint Rules. Category Joint Rules override Topological Joint Rules.