Forward and inverse kinematics
Note
The following examples use the ROS backend and the MoveIt! planner for UR5 robots. Before running them, please make sure you have the ROS backend correctly configured and the UR5 Demo started.
Forward kinematics
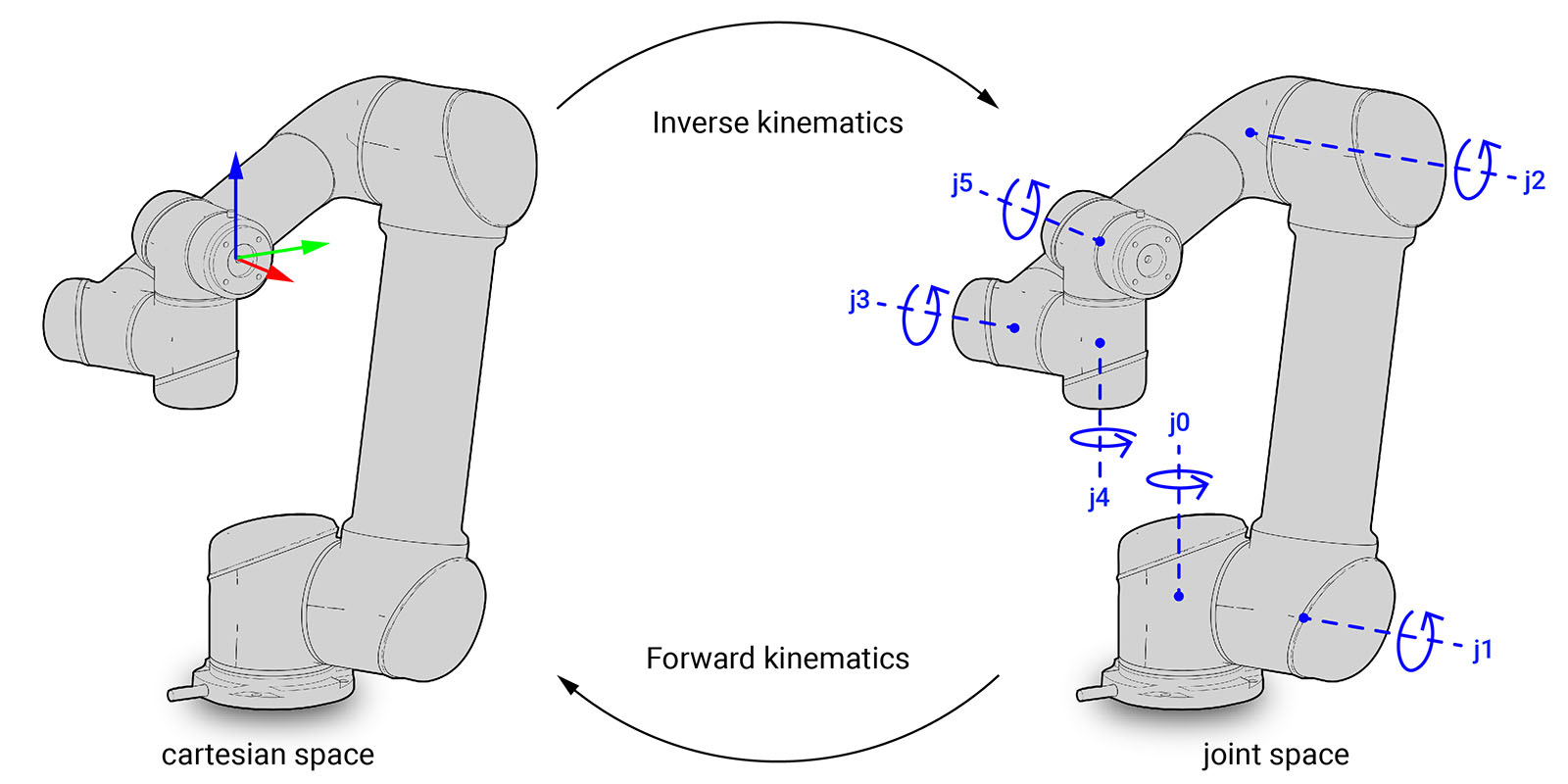
The forward kinematics function calculates the pose of the robot’s end-effector from joint states (joint space to cartesian space). This means the state of each joint in the articulated body of a robot needs to be defined.
Joint states are described in COMPAS FAB with the
compas_fab.robots.Configuration class.
The simplest way to calculate forward kinematics is based on the properties defined by the robot model and does not require ROS to be running:
from compas.robots import Configuration
from compas_fab.robots.ur5 import Robot
robot = Robot()
configuration = Configuration.from_revolute_values([-2.238, -1.153, -2.174, 0.185, 0.667, 0.])
frame_WCF = robot.forward_kinematics(configuration)
print("Frame in the world coordinate system")
print(frame_WCF)
assert repr(frame_WCF.point) == 'Point(0.300, 0.100, 0.500)'
Additionally, if the compas_fab.robots.Robot is assigned a client, it
will try to use it to resolve forward kinematics. The following example shows the same
solutions but calculated by ROS:
from compas.robots import Configuration
from compas_fab.backends import RosClient
with RosClient() as client:
robot = client.load_robot()
print(robot.name)
assert robot.name == 'ur5_robot'
configuration = Configuration.from_revolute_values([-2.238, -1.153, -2.174, 0.185, 0.667, 0.])
frame_WCF = robot.forward_kinematics(configuration)
print("Frame in the world coordinate system")
print(frame_WCF)
Inverse kinematics
Inverse kinematics is the inverse function of forward kinematics. The inverse kinematics function calculates the feasible joint states for the end-effector to reach a certain target pose (cartesian space to joint space).
The following code exemplifies how to calculate this:
from compas.geometry import Frame
from compas_fab.backends import RosClient
with RosClient() as client:
robot = client.load_robot()
assert robot.name == 'ur5_robot'
frame_WCF = Frame([0.3, 0.1, 0.5], [1, 0, 0], [0, 1, 0])
start_configuration = robot.zero_configuration()
configuration = robot.inverse_kinematics(frame_WCF, start_configuration)
print("Found configuration", configuration)
It is also possible to request multiple inverse kinematic solutions:
from compas.geometry import Frame
from compas_fab.backends import RosClient
with RosClient() as client:
robot = client.load_robot()
assert robot.name == 'ur5_robot'
frame_WCF = Frame([0.3, 0.1, 0.5], [1, 0, 0], [0, 1, 0])
start_configuration = robot.zero_configuration()
for config in robot.iter_inverse_kinematics(frame_WCF, start_configuration, options=dict(max_results=10)):
print("Found configuration", config)